
PhotoModeler Premium
PhotoModeler Premium为您提供了从照片中创建准确,高质量3D模型和测量的工具。该过程称为基于照片的3D扫描。
PhotoModeler Premium是一款3D扫描仪,可提供类似于3D激光扫描仪的结果(具有适当的纹理)。该3D扫描过程从几乎任何尺寸的纹理表面的照片产生密集点云(密集表面建模,DSM)。 PhotoModeler Premium也适用于许多无人机项目。
PhotoModeler Premium软件基本具备PhotoModeler Standard产品的所有功能,并具有进行密集曲面建模(DSM),3D扫描,SmartMatch,地理系统和动作捕捉的功能。由于Premium可以处理Standard的所有功能(例如编码目标,手动项目等),如果您有多种项目类型,Premium可能是您的最佳选择。请参阅产品概述页面上的图表,以便快速比较产品和详细的功能比较。
PhotoModeler Premium是一款先进的工具,可用于构建精确的密集曲面模型并从照片中获取测量结果。使用PhotoModeler Premium构建:
·密集曲面模型需要大量3D点。
·模型通常需要3D激光扫描仪
·无人机项目,如体积测量,正射照片,轮廓等。
·使用Motion功能随时间执行测量。
PhotoModeler Premium广泛用于以下领域:
测量、建筑、采矿、地质
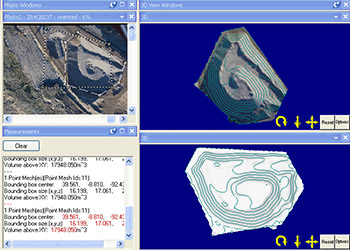
·切割/填充道路和地形结构
·矿山量和矿山恢复
·悬崖和岩面造型
·库存量
法医学、生物学、医学

·脚印和咬痕扫描
·形态模型和测量
·头骨和骨骼模型
建筑

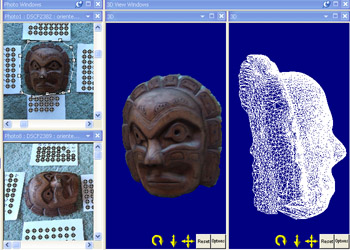
·模型/测量文物、挖掘、洞穴、雕刻
·形态测量
·用于策展目的的非接触式对象建模
无人机

·切/填
·正射照片马赛克/ DEM /轮廓
·体对象
·请参阅其他UAS应用程序示例
考古学、策展人

·模型/测量文物、挖掘、洞穴、雕刻
·形态测量
·用于策展目的的非接触式对象建模
电影、游戏、动画
·集合和工件的模型
·照片般逼真的纹理贴图
·理想化的照片
比较PhotoModeler Standard和Premium
PhotoModeler系列中有两种产品:
• PhotoModeler Standard——适用于手动,CAD,编码目标和单个照片项目。
• PhotoModeler Premium——适用于密集曲面建模和UAS项目 - 以及标准中描述的手动和目标项目。
PhotoModeler Premium包含PhotoModeler Standard的所有功能。
您应该使用哪种产品?
请注意,如果您有多种项目类型,Premium可以处理Standard可以执行的所有项目,从而使Premium成为最佳选择
|
您的领域 |
使用Standard |
使用Premium |
|---|---|---|
|
制造/制造 |
是 |
|
|
取证/单张照片 |
是 |
与激光扫描数据集成时。 |
|
事故重建 |
地面摄影 |
地面和无人机/无人机摄影 |
|
2D模板模式数字化 |
是的,使用Template Pattern Capture Add-on¹ |
包括附加组件 |
|
施工切割/填充 |
是 |
|
|
卷——库存堆等 |
是 |
|
|
DEM、轮廓、正射照片 |
是 |
|
|
无人机项目 |
简单的非自动化项目 |
更大的项目和对地理系统的需求 |
|
运动跟踪 |
是 |
|
|
电影和动画 |
是 |
|
|
2D模板数字化 |
是 |
|
|
研究/学术 |
简单和编码目标项目 |
其他一切 |
功能比较Standard 与 Premium
|
Standard |
Premium |
|
|
模型对象 |
||
|
点、线、边、圆柱 |
是 |
是 |
|
智买点 |
是 |
|
|
体对象 |
是 |
|
|
曲线:通过点引用和拟合,NURBS |
是 |
是 |
|
面 |
是 |
是 |
|
点云和网格曲面 |
是 |
|
|
3D飞机 |
是 |
是 |
|
形状/固体 |
是 |
是 |
|
剪影固体 |
是 |
是 |
|
表面绘制 |
是 |
是 |
|
网格曲面上的轮廓 |
是 |
|
|
主要和次要轮廓 |
是 |
|
|
网格曲面上的轮廓曲线 |
是 |
|
|
偏移点 |
是 |
是 |
|
物料 |
是 |
是 |
|
照片纹理 |
是 |
是 |
|
修正纹理 |
是 |
是 |
|
图层 |
是 |
是 |
|
测量 / 评论 |
||
|
捆绑调整 |
是 |
是 |
|
相机校准 |
是 |
是 |
|
现场校准 |
是 |
是 |
|
自动校准 |
是 |
|
|
子像素目标 |
是 |
是 |
|
球体目标 |
是 |
是 |
|
图表和图表 |
是 |
是 |
|
残差和精确报告 |
是 |
是 |
|
3D置信区域显示 |
是 |
是 |
|
3D视图光线显示 |
是 |
是 |
|
表 |
是 |
是 |
|
照片尺寸 |
是 |
是 |
|
测量窗格 |
是 |
是 |
|
检查距离和点 |
是 |
是 |
|
点评窗格 |
是 |
是 |
|
项目审核窗格 |
是 |
是 |
|
着色表面高度 |
是 |
是 |
|
着色网格表面模型 |
是 |
|
|
线对象延伸 |
是 |
是 |
|
审计功能 |
是 |
是 |
|
测量单位 |
是 |
是 |
|
上下文敏感和超链接的帮助 |
是 |
是 |
|
PDF手册 |
是 |
是 |
|
私人本地处理 |
是 |
是 |
|
SmartMatch |
是 |
|
|
密集曲面建模 |
是 |
|
|
多视图立体声 |
是 |
|
|
自动目标标记 |
是 |
是 |
|
自动参考 |
是 |
是 |
|
自动浮出水面 |
是 |
是 |
|
编码目标 |
是 |
是 |
|
模板目标 |
是 |
是 |
|
点自动检测 |
是 |
|
|
自动检测控制 |
是 |
|
|
单张照片支持 |
是 |
是 |
|
单张照片完全校准 |
是 |
是 |
|
低照片数支持 |
是 |
是 |
|
反相机 |
是 |
是 |
|
理想化 |
是 |
|
|
照片集 |
是 |
是 |
|
相机库 |
是 |
是 |
|
网格修改工具 |
是 |
|
|
三角网片和作物 |
是 |
|
|
防水网格创作 |
是 |
|
|
项目合并 |
是 |
是 |
|
纹理遮片 |
是 |
是 |
|
DSM遮片 |
是 |
|
|
色度键和alpha蒙版 |
是 |
是 |
|
动作——类型1 |
是 |
|
|
动作——类型2 |
是 |
|
|
模式捕获工作流程 |
与插件¹一起 使用 |
是 |
|
自动2D跟踪 |
与插件¹一起 使用 |
是 |
|
增强的照片查看 |
是 |
是 |
|
照片可视性控制 |
是 |
是 |
|
用户点标记 |
是 |
是 |
|
ZIP备份 |
是 |
是 |
|
脚本 |
是 |
是 |
|
多核支持加速核心算法 |
是 |
是 |
|
用户界面 |
||
|
可定制的用户界面 |
是 |
是 |
|
3D查看器 |
是 |
是 |
|
照片3D投影 |
是 |
是 |
|
3D查看器立体显示 |
是 |
是 |
|
3D查看器照片显示 |
是 |
是 |
|
主题 |
是 |
是 |
|
网络浮动许可证支持 |
是 |
是 |
|
选择控制 |
是 |
是 |
|
变焦控制 |
是 |
是 |
|
Epi-polar参考辅助线 |
是 |
是 |
|
外部接口 |
||
|
已加载多个图像类型 |
是 |
是 |
|
电影,数码和摄像机支持 |
是 |
是 |
|
导入视频 |
是 |
|
|
多种3D导出格式 |
是 |
是 |
|
导出照片纹理模型 |
是 |
是 |
|
导出正交马赛克映射模型 |
是 |
是 |
|
打印/输出视图 |
是 |
是 |
|
正射照片创作 |
是 |
是 |
|
正射照片混合,遮片和遮挡 |
是 |
是 |
|
点坐标变换 |
是 |
是 |
|
多尺度 |
是 |
是 |
|
地理坐标系 |
是 |
|
|
独立坐标系轴 |
是 |
是 |
|
控制点 |
是 |
是 |
|
约束 |
是 |
是 |
|
导入3D对象 |
是 |
是 |
|
自动分配导入数据 |
是 |
是 |
|
网格和点云导入 |
是 |
|
|
对准激光扫描仪点云 |
是 |
|
|
着色激光扫描仪点云 |
是 |
|
|
从图像中读取EXIF GPS信息 |
是 |
|
|
预定义的编码目标坐标 |
是 |
是 |
|
3D动画导出 |
是 |
是 |
|
上传到YouTube |
是 |
是 |
|
脚本和外部编程 |
是 |
是 |
|
灵活的文本和CSV导入 |
是 |
是 |
|
PDF报告生成 |
是 |
|
特征描述
|
特征 |
描述 |
|
|
模型对象 |
||
|
点,线,边,圆柱 |
3D建模的基本构建模块:3D点,线,边(不匹配照片的端点的线)和圆柱。 |
|
|
SmartPoints |
在照片中“有趣”功能上自动检测到的点数。 |
|
|
体对象 |
一个对象,可以更轻松地记录和测量2.5D卷(如库存) |
|
|
曲线:通过点引用和拟合,NURBS |
通过匹配两个或多个2D照片样条线或通过拟合3D点来绘制三维样条线。 |
|
|
曲面 |
曲面类型:三角形,路径,NURBS适合点,阁楼,扫掠,旋转,锥形。 |
|
|
点云和网格曲面 |
密集,三角形和点云表面。 |
|
|
3D平面 |
3D平面沿轴旋转,或适合选定的点,线或轮廓。 |
|
|
形状/固体 |
通过在一张或多张照片上匹配用户标记的边缘生成的长方体,金字塔等。 |
|
|
剪影固体 |
通过在多张照片上标记和引用2D轮廓来创建“有机”实体。 |
|
|
表面绘制 |
从单张照片在3D表面上绘制的点,线和曲线。 |
|
|
网格曲面上的轮廓 |
在网格曲面上以用户定义的间隔提取轮廓线。 |
|
|
主要和次要轮廓 |
为次要轮廓和主要轮廓提供不同的显示特征。 |
|
|
网格曲面上的轮廓曲线 |
从用户定义的平面与网格曲面的交点提取的轮廓曲线。 |
|
|
偏移点 |
从已知关系的单点和双点自动计算虚拟3D点。对于难以到达或难以到达的点的许多测量任务非常有用。 |
|
|
材料 |
具有镜面控制的纯RGB颜色,以及在创建的3D表面上的照片纹理。 |
|
|
照片纹理 |
用于从原始照片中提取的3D查看和导出的详细纹理。从单张照片或从多张照片混合——遮挡检查可选。 |
|
|
修正纹理 |
从照片中提取的照片纹理消除了所有透视和镜头畸变像差,然后使用多照片混合选项提供了出色的效果。 |
|
|
图层 |
逻辑分组对象以供查看和导出。 |
|
|
测量/评论 |
||
|
捆绑调整 |
主要的摄影测量算法,可根据摄影标记和摄像机信息生成准确的3D数据。 |
|
|
相机校准 |
从提供的模式中对相机进行离线高精度校准。解决焦距,像素大小,主点和镜头失真问题。 |
|
|
现场校准 |
能够在解决实际测量项目的同时校准摄像机的内部参数。 |
|
|
自动校准 |
在SmartMatch期间,改进相机的校准以获得更高的精度。 |
|
|
子像素目标 |
圆形,高对比度目标的2D中心寻找到亚像素精度——用于提高3D点项目的整体精度。 |
|
|
球体目标 |
在照片中精确定位球体目标。非常适合激光扫描仪数据集成。 |
|
|
图表和图表 |
图表和图表关键质量指标(例如点残差,角度和照片连接)。 |
|
|
残差和精确度报告 |
报告点残差和精确度,以帮助评估准确性和故障排除。 |
|
|
3D置信区域显示 |
可以使用与真实偏差和误差相关性相对应的误差椭球显示3D查看器中的点。它以图形方式显示每个点的方向和相对精度。 |
|
|
3D视图光线显示 |
在3D查看器中显示相机位置和点之间的“光线”,以描绘它们之间的关系。对于单点,照片上的所有点或多个选择。 |
|
|
表格 |
类似电子表格的数据表,显示有关照片,模型对象等的信息。可配置列,排序等。 |
|
|
照片尺寸 |
参数尺寸线显示用户选择的点之间的照片,可以导出。 |
|
|
测量窗格 |
滚动模型对象之间的用户控制测量列表,例如:点到点,点到线,线到线,点到点,角度,体积和区域。 |
|
|
检查距离和点 |
显示用户输入距离与计算距离之间当前误差差异的特殊表格。类似地,对于显示x,y,z和距离误差的3D点。 |
|
|
点评窗格 |
显示以所选点的所有参考为中心的图像子区域。非常适合快速查看和修改多张照片上的点位置。 |
|
|
项目审核窗格 |
向导和用户界面窗格,提供有关项目质量和可能问题的智能反馈。 |
|
|
着色表面高度 |
高度伪色表面。 |
|
|
着色云和网格表面模型 |
由高度和照片重叠数量组成的伪色点云和网格表面。 |
|
|
线对象延伸 |
直线,圆柱和边具有一个属性,它以3D给定百分比扩展对象。在3D查看器中,查看对象任一端的虚线延伸——用于可视化两个或多个线条或圆柱在3D空间中相交的位置。 |
|
|
审计功能 |
审核对话框提供有关模型对象及其质量的概述数据。 |
|
|
测量单位 |
处理显示,导入和导出的不同测量单位:km,m,cm,mm,mile,yd,ft,survey ft(2014.1),和in。 |
|
|
上下文敏感和超链接的帮助 |
广泛的帮助文件,包含来自程序对话框的链接以提供上下文,以及广泛的内部超链接以便于浏览。 |
|
|
PDF手册 |
完全手动匹配PDF文件提供的帮助文件,以便于浏览。 |
|
|
私人本地处理 |
处理在本地计算机上进行并且是私有的。 |
|
|
SmartMatch |
自动提取和匹配图像中的自然特征点,以及生成3D数据的方向和处理。 |
|
|
密集曲面建模 |
通过匹配图像上的纹理表面来提取密集的3D点云。 |
|
|
多视图立体声 |
密集表面模型提取更容易和更高质量的MVS方法。 |
|
|
自动目标标记 |
自动搜索和高精度标记一个或多个图像中的圆点目标。 |
|
|
自动参考 |
自动匹配/参考图像中的非编码目标和照片点。 |
|
|
自动浮出水面 |
从自动标记和自动参考点创建三角形曲面。 |
|
|
编码目标 |
编码目标是点目标,可以标记为高精度,并具有唯一的代码环,程序可以读取这些代码环以唯一地标识点并匹配/引用它们。非常适合自动化高精度项目。编码目标可以在您自己的激光打印机上以不同尺寸打印。 |
|
|
模板目标 |
可以自动检测到具有用户定义形状而非圆形点的目标。 |
|
|
点自动检测 |
从一张照片中的单个标记自动检测,标记和参考其他照片中的点。 |
|
|
自动检测控制 |
从一张照片中的单个标记自动检测,标记和参考其他照片中的控制点和多点变换点。 |
|
|
单张照片支持 |
使用各种约束(例如已知点或线关系)从单张照片中提取信息的能力。 |
|
|
单张照片完全校准 |
能够从具有足够控制点的单张照片进行完整的相机校准。非常适合使用广角相机进行取证。 |
|
|
低照片数支持 |
从2或3张照片中提取有用信息的能力——在取证事件中常见,或者您没有拍摄照片。 |
|
|
反相机 |
从照片和未知相机的约束重建相机参数(如焦距,主点和像素形状)。取证的伟大工具。 |
|
|
理想化 |
从照片中移除镜头失真和其他相机效果,使其“理想”(就像从针孔相机中获得)。适用于外部渲染和动画软件中的背景透视匹配。 |
|
|
照片集 |
将照片分组为逻辑集以供查看和处理。适合拥有大量照片的项目。 |
|
|
相机库 |
可以轻松存储和检索相机校准数据的库。 |
|
|
网格修改工具 |
用于填充孔,抽取,平滑等密集点网格的工具。 |
|
|
三角网片和作物 |
通过切片和裁剪三角网格来创建干净边缘的工具。 |
|
|
防水网格创作 |
创建一个水密的三角网——非常适合导出到3D打印。 |
|
|
项目合并 |
将多个项目合并为一个具有一致坐标系的项目。 |
|
|
纹理遮片 |
控制照片的哪个部分的位掩码是纹理数据的来源。 |
|
|
DSM遮片 |
一个位掩码,用于控制扫描照片的哪个部分以进行密集曲面建模。 |
|
|
色度键和alpha遮片 |
从输入alpha通道或色度键(蓝色/绿色背景)创建位掩码。 |
|
|
动作——类型1 |
跨帧跟踪目标以使用多个同步摄像机随时间生成3D模型。 |
|
|
动作——类型2 |
跟踪视频帧中的目标,其中对象移动缓慢且使用一??个摄像机。 |
|
|
模式捕获工作流程¹ |
工作流程和工作空间使得进行2D模板化项目变得更加容易。 |
|
|
自动2D跟踪¹ |
用于在2d模板和图案中自动检测线条和边缘的工具,以及从这些线条和边缘创建精确的曲面绘制。 |
|
|
增强的照片查看 |
修改照片的旋转,亮度和对比度,以便于查看。 |
|
|
照片可视性控制 |
控制照片上显示的对象,类型和图层——以便在需要时减少混乱。 |
|
|
用户点标记 |
简单的“标记”点以供将来参考的方法。 |
|
|
ZIP备份 |
一个命令将所有相关项目数据(照片和数据文件)保存在一个zip文件中,以便于存储或传输。 |
|
|
脚本 |
在控制台中运行脚本命令,或使用命令加载文本文件。请参阅下面的外部可编程性。 |
|
|
多核支持加速核心算法 |
PhotoModeler的许多计算密集型算法使用多线程处理来共享负载并加速多核处理器的处理。 |
|
|
用户界面 |
||
|
可定制的用户界面 |
工具栏,快捷键,窗口布局和表格配置都是用户可配置的。 |
|
|
3D查看器 |
用于显示生成的3D模型,网格,纹理等的窗口。 |
|
|
照片3D投影 |
在顶部显示3D模型数据,并投影到原始照片上。 |
|
|
3D查看器立体显示 |
使用立体眼镜查看具有真实深度的3D查看器。 |
|
|
3D查看器照片显示 |
在3D视图中以正确的位置和方向显示照片的小版本。 |
|
|
主题 |
安装主题以更改用户界面颜色,着色效果和按钮样式。 |
|
|
网络浮动许可证支持 |
在LAN上运行多个许可证。 |
|
|
选择控制 |
各种工具可帮助更快地找到照片中的点和特征 - 用于突出显示其他照片上所有参考数据的W键,用于即时其他照片选择反馈的子选择高光,以及用于提供以选择为中心的照片缩放控制的缩放。 |
|
|
变焦控制 |
各种照片缩放功能,如鼠标滚轮缩放,缩放弹出窗口,访问缩放的备用键等。 |
|
|
Epi-polar参考辅助线 |
在手动点参考期间出现在其他照片中的线条,以指示其他点应该在哪里。 |
|
|
外部接口 |
||
|
已加载多个图像类型 |
JPEG,Tiff,BMP,画笔,Targa,PNG,Pict,Photoshop,PPM,MAC,IFF,CALS光栅,PhotoCD,SGI和MS Hdphoto。 |
|
|
电影,数码和摄像机支持 |
从数码,视频和胶片相机中加载并有效使用照相静止图像。 |
|
|
导入视频 |
以mov,mp4,avi,wmv,3gp和mpg格式导入视频(取决于编解码器——包括h.264),具有手动和自动帧提取功能。 |
|
|
多种3D导出格式 |
3D Studio(3ds和Max),Rhino 3DM,CSV,DXF,Filmbox,IGES,Google Earth,ASPRS LAS,Maya脚本,Wavefront-OBJ,STL,VRML,BYU和Facet。 |
|
|
导出照片纹理模型 |
使用3DS,OBJ,VRML和3DM格式的映射和校正照片纹理文件导出3D数据。 |
|
|
导出正交马赛克映射模型 |
使用来自高质量正射马赛克的贴图纹理UV导出2.5D曲面。非常适合航空和无人机项目。 |
|
|
打印/输出视图 |
打印并复制照片视图,表格视图和3D视图的内容到剪贴板。表视图也可以轻松导出到Excel。 |
|
|
正射照片创作 |
创建和导出具有正交投影的重新映射图像(删除所有透视效果)并进行缩放。 |
|
|
正射照片混合,遮片和遮挡 |
先进的正射影像创建功能:混合混合多张照片以减少曝光变化;掩盖 - 掩盖不需要的物品;遮挡检查 - 从阻塞几何体中移除纹理 |
|
|
点坐标变换 |
三个或更多外部定义的点或轴来定义坐标系。 |
|
|
多尺度 |
摄影测量项目是无标度的,直到定义了比例。可以提供一个或多个比例距离。 |
|
|
地理坐标系 |
导入地理系统中的外部3D数据,以及指定用于导出的输出地理系统。 GPS和调查数据。支持相机站,指定地理坐标的点以及控制或变换。 |
|
|
独立坐标系轴 |
通过选择独立的点和/或线来定义坐标系轴(X,Y,Z)。使用向导帮助设置常见且简单的方案。 |
|
|
控制点 |
导入已知的3D数据点(来自测量或其他来源)以控制3D项目的方向和坐标系。 |
|
|
约束 |
用户指定平行和垂直关系的约束。 |
|
|
导入3D对象 |
导入3D文件以与摄影和创建的3D数据结合并叠加。 |
|
|
自动分配导入数据 |
自动将控制,固定和多点变换点分配给项目中的关联点。可以通过匹配用户名或点ID来分配点数。 |
|
|
网格和点云导入 |
导入点云(LAS,STL,OBJ,PLY,BYU,FACET,DAT,TXT)。 |
|
|
对准激光扫描仪点云 |
导入激光扫描仪点云和一些匹配的目标点,并与相同区域的现有PhotoModeler扫描仪项目对齐。 |
|
|
着色激光扫描仪点云 |
导入激光扫描仪点云并将其与照片匹配,然后自动从一张或多张照片上的投影中提取颜色值以生成RGB点云。 |
|
|
从图像中读取EXIF GPS信息 |
一些相机系统可以在每个图像的EXIF标签中存储相机位置的准确地理坐标。 PhotoModeler可以加载此数据并在多点变换中使用它来设置准确的地理坐标系。非常适合具有地理标记摄像头的无人机。 |
|
|
预定义的编码目标坐标 |
用户定义的坐标变换点与编码目标ID相关联,用于自动分配和项目坐标系设置。 |
|
|
3D动画导出 |
将动画(飞越等)导出为各种视频格式。 |
|
|
上传到YouTube |
将3D查看器动画直接上传到YouTube。 |
|
|
外部可编程性 |
从外部编程语言控制程序(创建项目,标记照片,密集表面建模,智能匹配等)。 |
|
|
灵活的文本和CSV导入 |
灵活导入3D点和距离csv,空格分隔的数据文件。控制要导入的行和列及其顺序。非常适合调查,并从外部仪器和程序导入点云。 |
|
|
PDF报告生成 |
生成一个好看的项目pdf报告供内部使用或客户提交。 |
|